Это короткий рассказ про домашнего робота Dolley и его эволюциию.Робота хотелось сделать уже давно, для начала робота на колёсах. Сначало нужно было сделать шасси. Вариант покупки готового шасси не так интересен как сборка его самому. Решил пробовать всё на практике, от самого простого.
1. Началось все с покупки конструктора похожего на старый советский и двух самых дешовых китайских машинок с моторчиком. Первый вариант: прямой привод сразу с мотора на колесо
Робот практически не сдвигается с места, при питании от двух и даже 4-х батареек АА, нужен редуктор.
2. Простейшие редукторы из двух шестерёнок (из тех же самых дешевых китайских машинок)

Робот еле ползает, дополнительный груз везти не может, нужен редуктор с передаточным отношением побольше
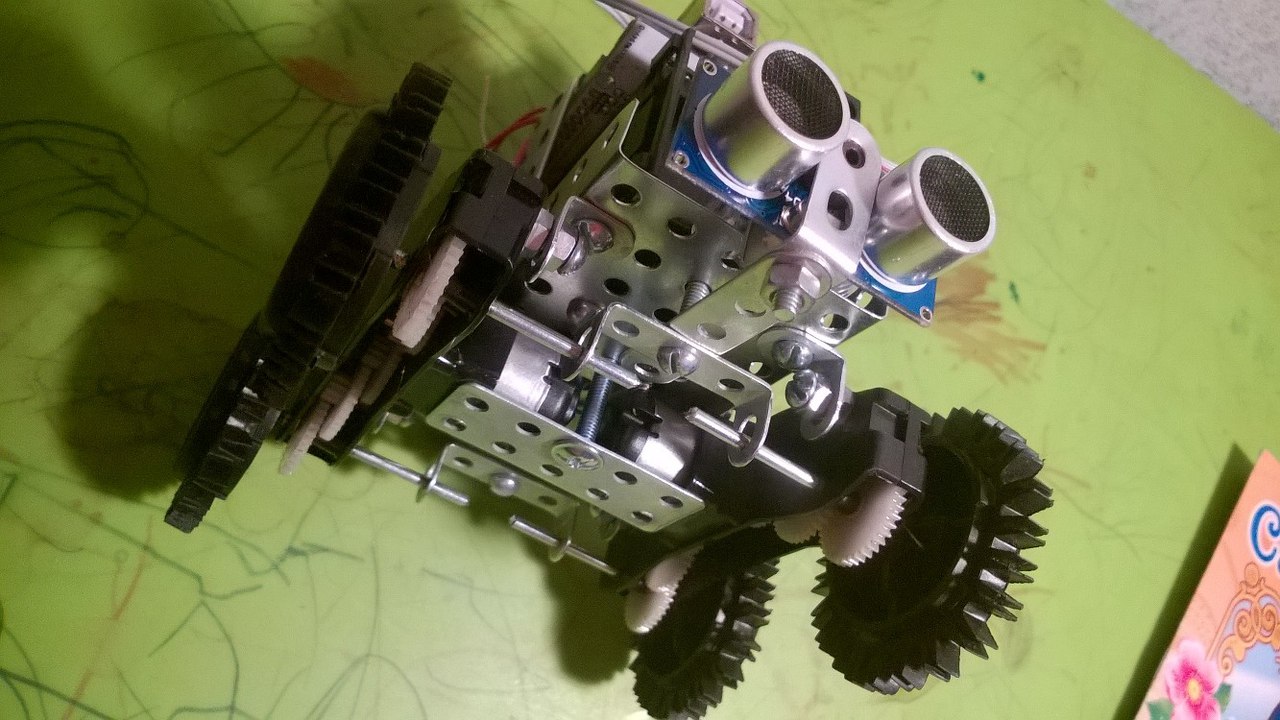
3. Шаси на базе «фенольных танков». Для тех кто не знает что это такое вот легендарный пост: Они выделяли фенол! Или в помощь начинающему 🙂.

Привод сотоит из двух моторов с редукторами, привод на все 4 колеса, правая и левая часть независимо друг от друга. Кстати похоже фенольные танки нынче уже не те, в оригинальном посте редуктор гораздо лучше исполнен, в тех что мне удалось достать пластик тоньше и защёлки вместо винтов, пару раз подклеивал уже суперклеем.
Искать «фенольный танк» лучше по названию «танк-перевёртыш», я долго искал, а теперь когда купил — вижу их повсюду, в Игрограде целая полка танков и машинок таких, и на рынке много.
При сборке приклеил пару гаек и пластину от конструктора к редукторам, а потом соединил всё штатно, как конструктор. Отлично ездит по ленолиуму, ковру и другим поверхностям, преодолевает небольшие препятствия, умеет танковый разворот на месте.
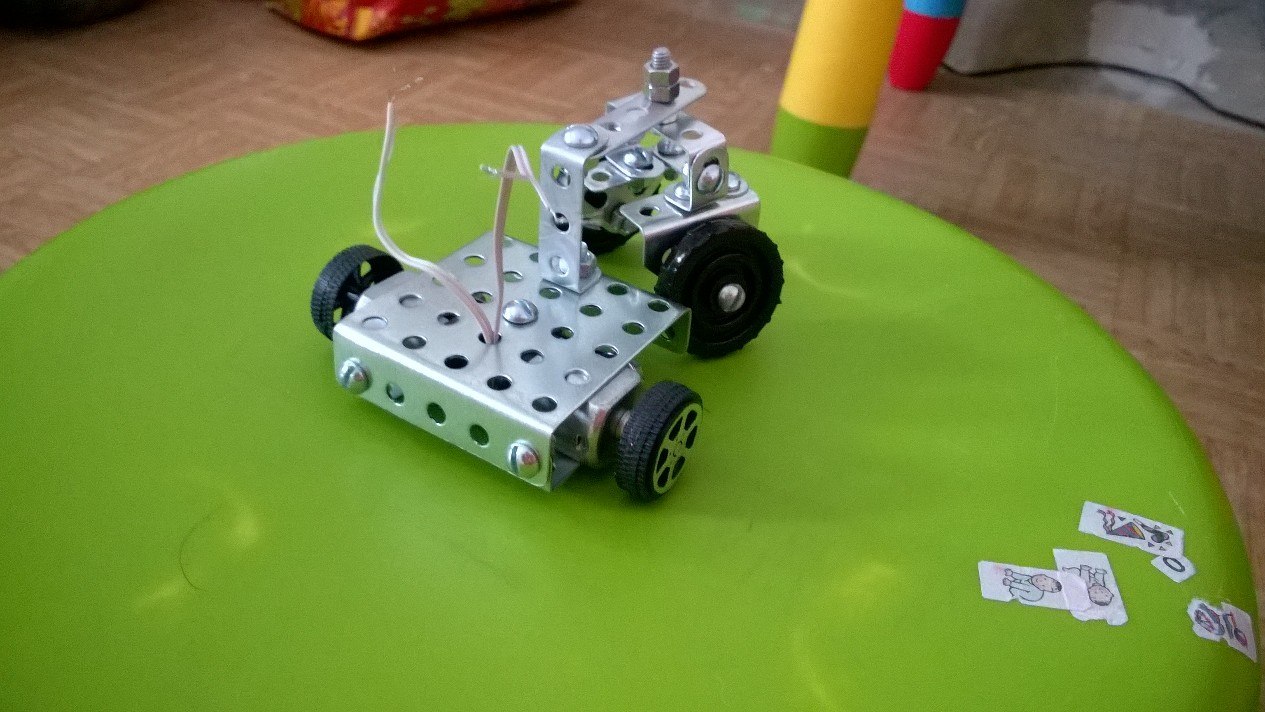
4. Первый работающий прототип.
Контролер Arduino Uno, один ультразвуковой сенсор, драйвер двигателя L293D, питание от 4х никелиевых аккумуляторов AA (напряжение 4.8-5 V). Питание подал прямо в цепь 5V Arduino и параллельно на двигатели, при заклинивании колеса напряжение просаживается(видно по светодиоду ардуины) но перезапусков и сбоев не наблюдалось. На будующее нужно ограничить ток двигателей. Есть проблемы с конструкцией: сенсор слишком высоко и не видит препятствий внизу, батарейный блок сзади перевешивает, робот часто заваливается назад.
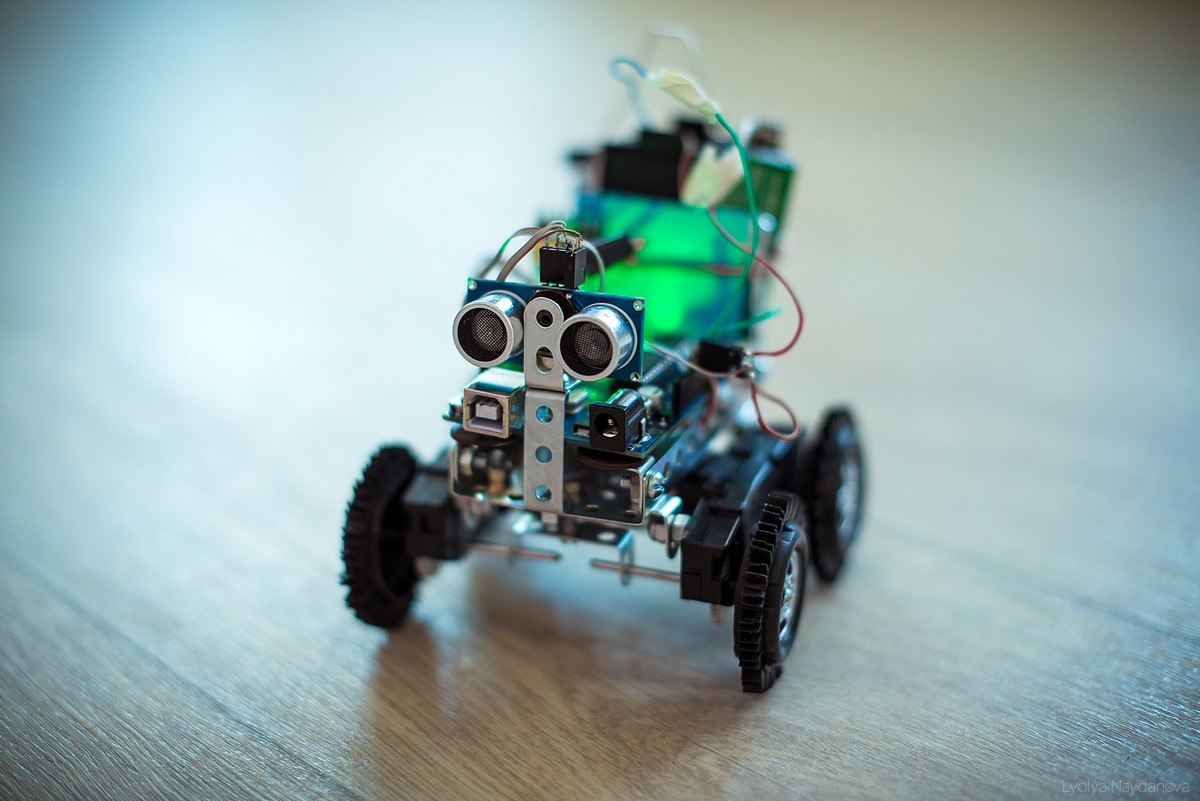
5. Второй прототип
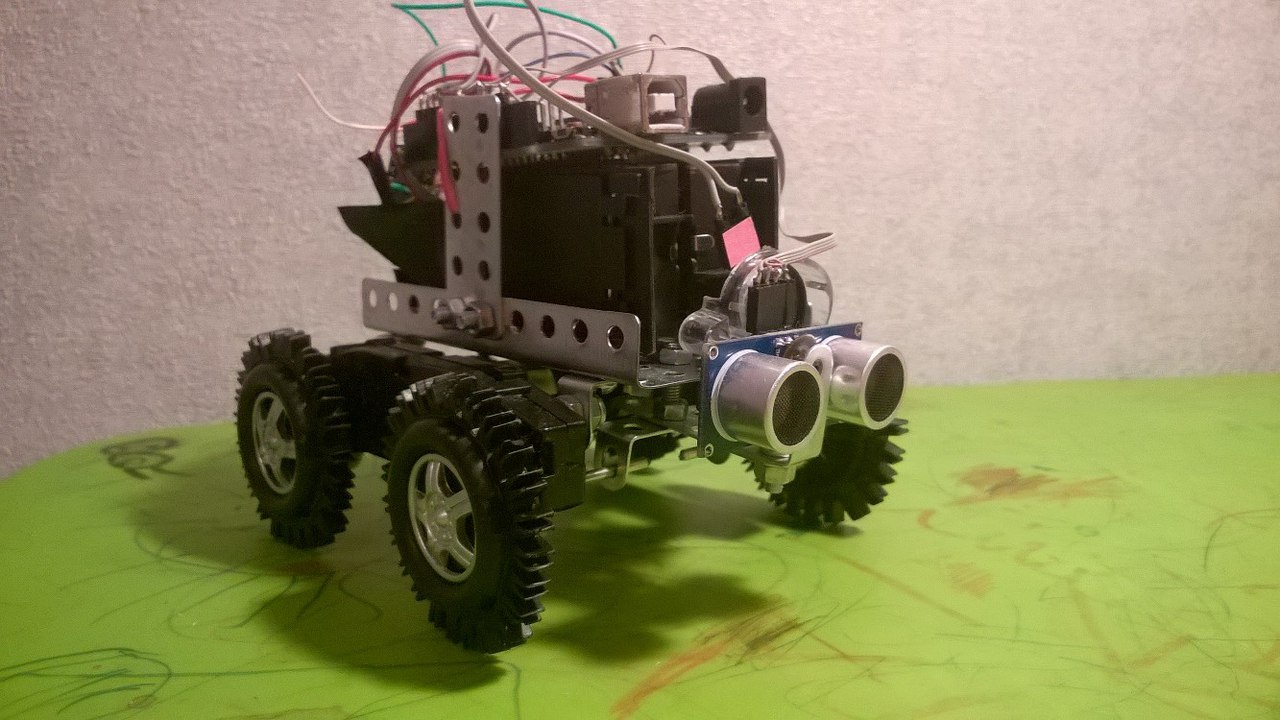
Исправил проблему с центром тяжести, сенсор поставил пониже. Добавил динамик(8-омный сразу на ногу контроллера), робот может воспроизводить звуки.
Программа робота: робот постоянно движется, ультрозвуковым сенсором детектирует препятствия и старается избежать столкновения и застревания. пока программа очень сырая, но уже забавно.
Сейчас решаю какое дать ему задание и каких датчиков ему добавить